📄 论文信息
论文标题: A Cyclotomic-Linked Kinematic Model for Continuum Robots and Its Application in Rigid-Flexible Hybrid Arms
作者: Xu Zhang, Sheng Yang, Peng Yuan, Zhibin Song, Tao Sun, David T. Branson, Rong Kang
发表会议: IEEE International Conference on Robotics and Biomimetics (ROBIO), Chengdu, China, December 2025
摘要: The control of continuum robots is generally based on a kinematic model consisting of the actuation-configuration-task spaces. The nonlinear relationship between the actuation and configuration space makes it challenging to build control systems for continuum robots. This paper introduces the cyclotomic-linked kinematic model (CLKM), a pragmatic modeling approach designed to bridge this integration gap by replacing the configuration space with an intuitive joint space. The cornerstone of CLKM is the establishment of a linear relationship between actuation and joint spaces, which simplifies the control system design. The proposed model is applied to a rigid-flexible hybrid arm system, demonstrating its effectiveness in motion planning and precise control.
🎯 研究背景
连续体机器人的运动学建模需要兼顾精度和计算效率,特别是在刚柔混合臂系统中:
- 建模精度: 需要准确描述连续体变形
- 计算效率: 实时控制需要高效计算
- 刚柔耦合: 刚柔混合臂系统建模复杂
🔬 研究方法
1. 环链式运动学建模
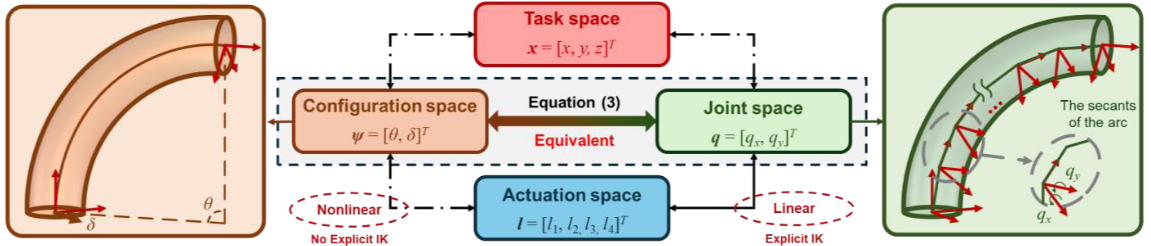
图 1:环链式运动学模型原理
提出环链式运动学模型 (Cyclotomic-linked Kinematic Model, CLKM):
- 模型结构: 采用环链式结构描述连续体变形
- 精度平衡: 平衡建模精度和计算复杂度
- 参数辨识: 通过实验数据辨识模型参数
2. 刚柔混合臂应用
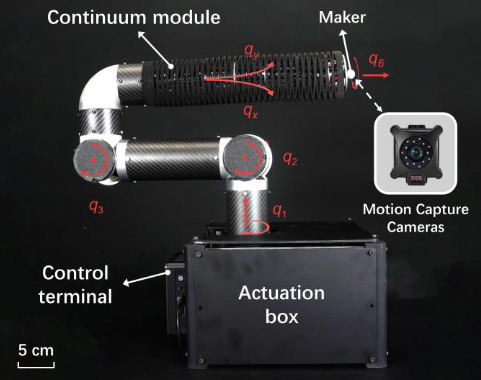
图 2:刚柔混合臂系统设计
将模型应用于刚柔混合臂系统:
- 系统集成: 将连续体模块与刚性机械臂集成
- 运动规划: 实现刚柔混合臂的运动规划
- 精确控制: 实现系统的精确运动控制
🎥 实验演示
连续体机器人环链式运动学模型及刚柔混合臂实验演示
📊 研究成果
模型性能对比
| 指标 | 传统模型 | 环链式模型 | 提升 |
|---|---|---|---|
| 建模精度 | 基准 | 提高 | 更准确描述变形 |
| 计算效率 | 基准 | 提升 | 适合实时控制 |
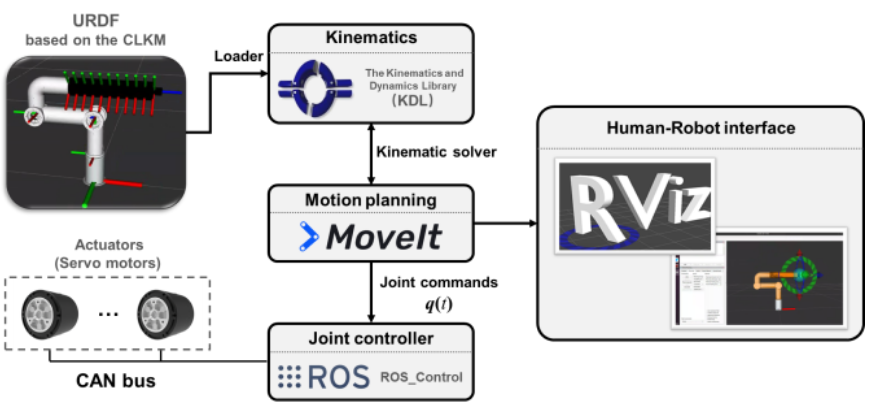
图 3:刚柔混合臂运动性能测试
最后更新:2026 年 3 月