📄 论文信息
论文标题: An adaptive lumped-mass dynamic model and its control application for continuum robots
作者: Xu Zhang, Chenghao Yang, Zhibin Song, Mojtaba A. Khanesar, David T. Branson, Jian S. Dai, Rong Kang
发表期刊: Mechanism and Machine Theory, Volume 201, October 2024, 105736
摘要: Continuum robots exhibit large-range nonlinear deformation and dynamic parameter variations during motion. Traditional dynamics models with fixed parameters struggle to accurately describe their dynamic characteristics. This paper proposes an adaptive lumped-mass dynamic (ALMD) model for continuum robots. The dynamic parameters under different robot statuses are estimated by using the genetic algorithm (GA). A dataset consisting of the robot status and the corresponding dynamic parameters is established to train a multilayer perceptron (MLP), which can predict the dynamic parameters in real time according to the robot status. Based on the ALMD model, a feedforward controller is designed to improve the trajectory tracking performance. Experimental results show that the maximum and average modeling errors are reduced by 60.2% and 45.8% respectively, and the maximum and average tracking errors are reduced by 67.5% and 52.3% respectively.
🎯 研究背景
连续体机器人在运动过程中存在大范围非线性变形和动态参数变化,传统固定参数动力学模型难以准确描述其动态特性。
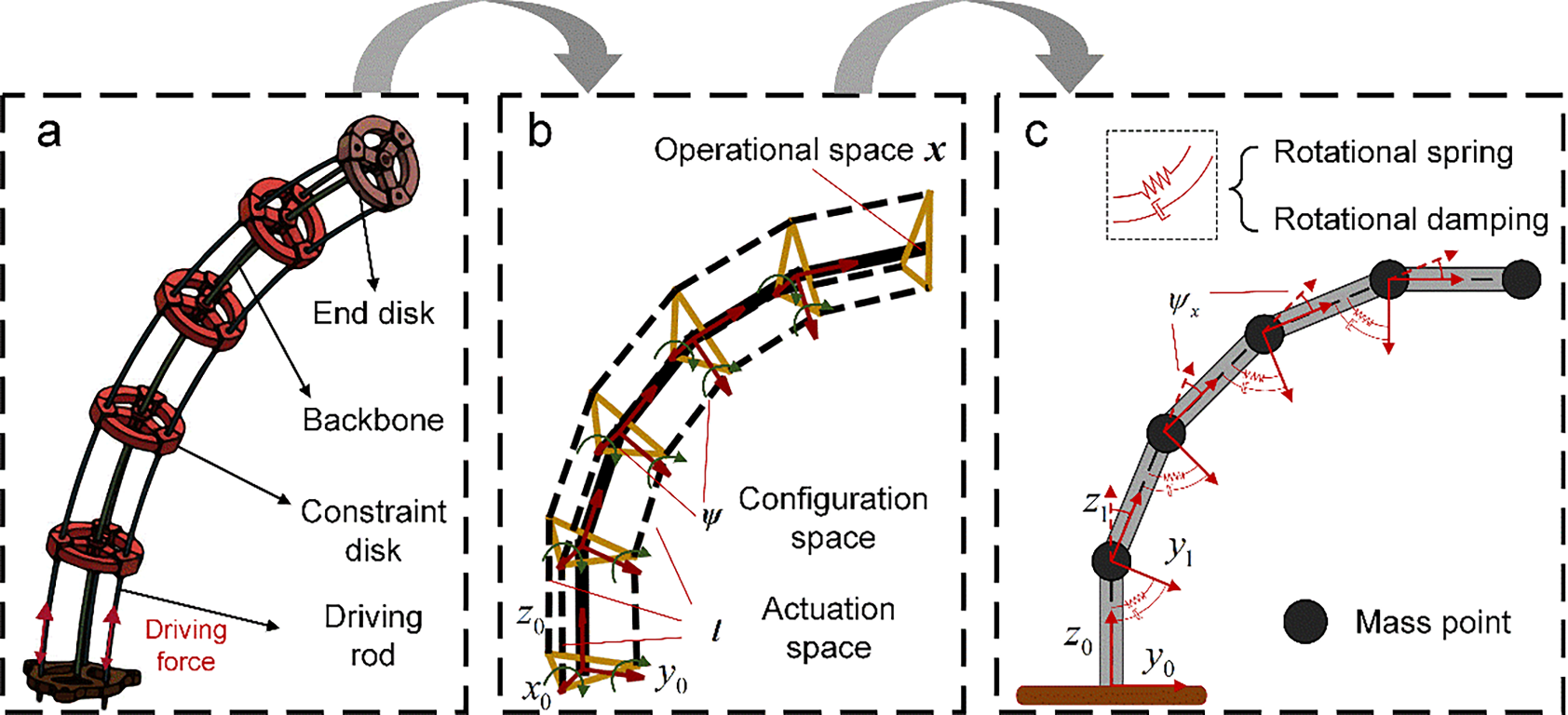
图 1:连续体机器人建模:(a) 机器人结构,(b) 运动学模型,(c) 集总参数动力学模型 (LMD)
主要挑战包括:
- 非线性变形: 连续体机器人运动时产生大范围非线性变形
- 参数时变: 动态参数随运动状态实时变化
- 建模困难: 传统方法难以建立精确的动态模型
🔬 研究方法
1. 集总参数动力学建模
建立包含关节弹性和粘性参数的集总参数动力学模型 (Lumped-mass Dynamic Model, LMD):
- 将连续体机器人离散化为多个质点 - 弹簧 - 阻尼系统
- 考虑关节的弹性变形和粘性阻尼效应
- 通过拉格朗日方程建立系统动力学方程
2. 自适应参数调整

图 2:基于遗传算法 (GA) 的参数估计流程
通过数据驱动方法实现动力学参数的实时自适应调整:
- 参数估计: 使用遗传算法 (GA) 估计不同运动状态下的最优动态参数
- 数据集构建: 收集不同位置、速度下的最优参数数据
- 神经网络训练: 训练多层感知机 (MLP) 建立运动状态到动态参数的映射
- 实时调整: 实现动力学模型的实时参数自适应 (Adaptive Lumped-mass Dynamic, ALMD)
3. 前馈控制器设计
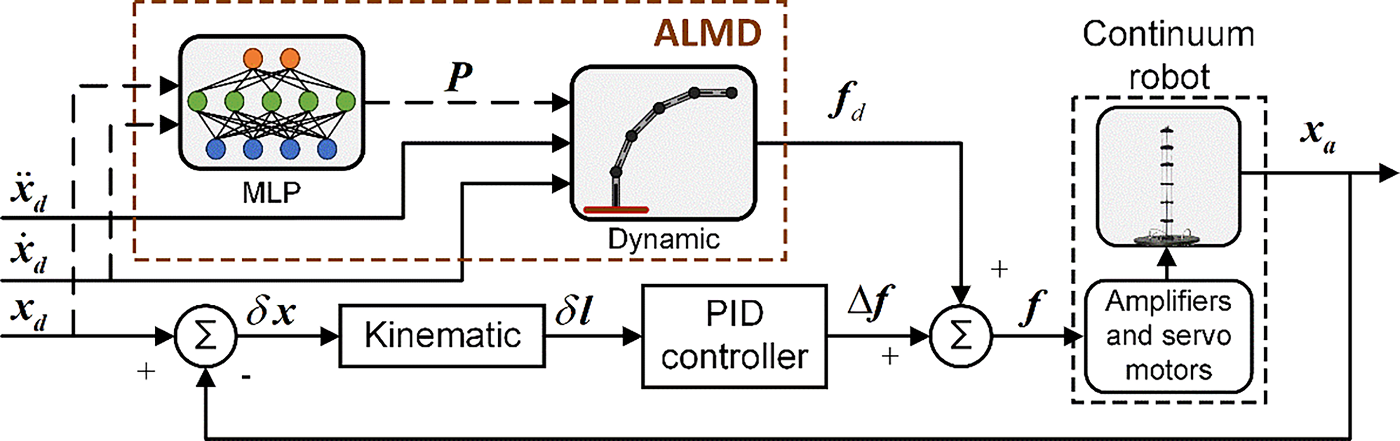
图 3:基于 ALMD 的前馈控制方案
基于 ALMD 模型设计前馈控制器:
- 利用 ALMD 模型预测所需的关节力矩
- 结合反馈控制实现精确轨迹跟踪
- 在连续体机器人原型机上验证控制性能
🎥 实验演示
连续体机器人自适应动力学建模与控制实验演示
📊 研究成果
建模精度提升
| 指标 | 固定参数 LMD | 自适应 ALMD | 提升 |
|---|---|---|---|
| 最大建模误差 | 基准 | -60.2% | 显著降低 |
| 平均建模误差 | 基准 | -45.8% | 明显降低 |
控制性能提升
| 指标 | 传统控制 | ALMD 前馈控制 | 提升 |
|---|---|---|---|
| 最大跟踪误差 | 基准 | -67.5% | 显著降低 |
| 平均跟踪误差 | 基准 | -52.3% | 明显降低 |
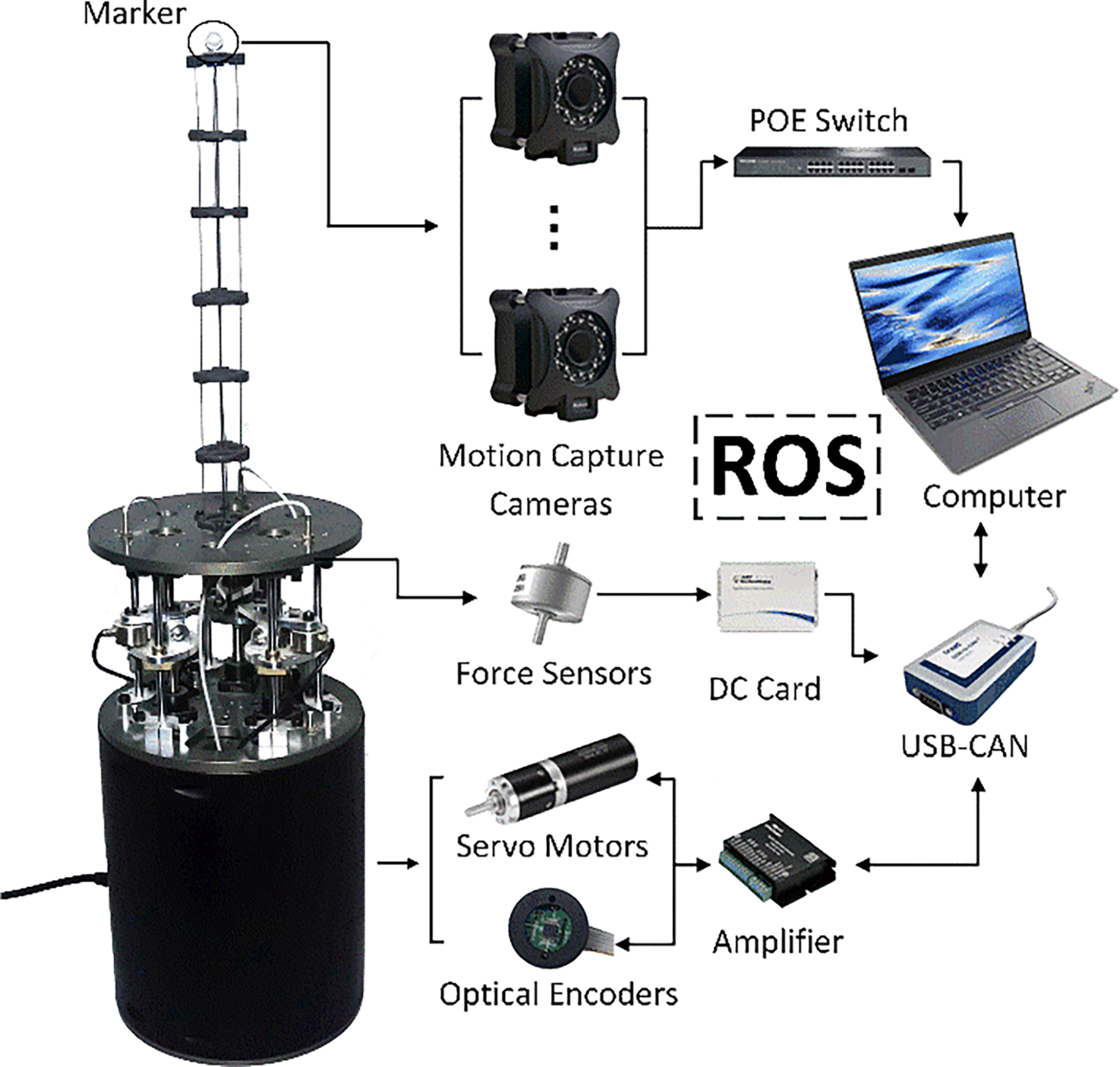
图 4:连续体机器人原型机实验平台
最后更新:2026 年 3 月